
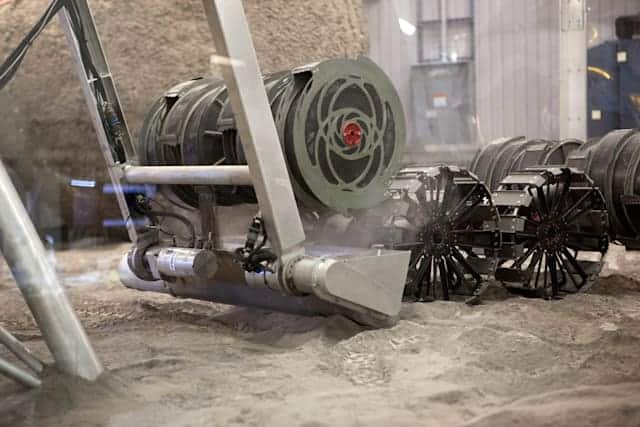
NASA’s Artemis program will eventually need robots to help live off the lunar soil, and it’s enlisting help from the public to make those robots viable. The space agency has picked winners from a design challenge that tasked people with improving the bucket drums RASSOR (Regolith Advanced Surface Systems Operations Robot) will use to dig on the Moon. The victors all had clever designs that should capture lunar regolith with little effort — important when any long-term presence might depend on bots like this.
The winner was a trap from Caleb Clausing that uses a passive door to grab large amounts of soil while remaining dust-tolerant. Others included a simple-yet-effective drum from Michael R, another from Kyle St. Thomas that uses narrow drums, an efficient double-helix design from Stephan Weiβenböck and a model from Clix that uses both gravity and weight to help movement.
It’ll be a while before NASA finishes testing these designs and implements some or all of the technology into RASSOR. Not that the administration minds. It saw this as accelerating the development of space tech by drawing on help from “outside of the space industry.” You’ll know who to thank if explorers are more effective at harvesting Moon soil for building shelters or otherwise reducing the need to bring loads of resources from Earth.